computer







|
|
Einige der ersten Programme auf kleinen Minicomputern der 60er und 70er waren einfache einachsige Mondlande-Spiele, so auch eines für die PDP-8 von DEC (Abb. 7), einem Computer, der ähnliche Fähigkeiten wie der von Apollo besaß. Sicherlich war die Darstellungskraft der Spiele wegen der fehlenden dreidimensionalen Grafik und realistischen Soundeffekte (Abb. 1) mangelhaft, aber sie zeigten sehr gut die grundsätzlichen phsikalischen Verhaltensweisen. Weiter unten wird der Unterschied zwischen einem Computer für allgemeine und dem für spezielle Aufgaben näher erläutert.
Die gefühlsmäßige Vorstellung, dass reale Dinge anspruchsvoller seinen als deren Simulation, ist falsch. Die Simulation soll nicht nur das Verhalten des Objektes nachbilden, sondern muss programmtechnisch auch seine Umgebung erzeugen, z.B. externe Einflüsse wie die Gravitation. Der Apollo Steuerungscomputer brauchte die lunare Umgebung nicht als Teil seines Programmes nachbilden; er war mittendrin in der lunaren Umgebung.
Wenn in einer funkelnden und blitzenden Landesimulation ein Schalter betätigt werden muss, bedeutet dies, dass mit einer Mausgeste ein Icon auf dem Bildschirm angeklickt werden muss. Das Programm enthält den Code, um das Icon zu erstellen, zu verändern, die Bewegungen der Maus zu interpretieren und in die gewünschte Verhaltensänderung des Programmes zu überführen. All dies braucht der echte Steuerungscomputer nicht. Der Pilot legt einen Schalter um und das entsprechende Computer-"Bit" wird durch elektronische Schalter innerhalb der Elektronik gesetzt oder gelöscht.
 Computer
Chips waren 1969 noch gar nicht erfunden, so dass es überhaupt keine
Möglichkeit für die NASA gab, die Apollo Computer zu bauen.
Computer
Chips waren 1969 noch gar nicht erfunden, so dass es überhaupt keine
Möglichkeit für die NASA gab, die Apollo Computer zu bauen.
|
Es hängt davon ab, was Sie mit "Computer Chip" meinen. Ein heutiger preiswerter Mikroprozessor der Intel Pentium Serie besitzt Register, Speicher-Cache, Prozessoren für Fließkommaarithmetik und eine Grafikbeschleunigung, die bereits im Chip integriert sind. Vor nicht allzu langer Zeit mußten solche zusätzlichen Funktionen mit zusätzlichen externen Schaltkreisen realisiert werden. Es war in der Tat ein großer Durchbruch, eine komplette CPU innerhalb eines Chips zu vereinen, aber einfache integrierte Schaltungen waren schon Anfang 1960 verfügbar, aus denen man eine komplette CPU aufbauen konnte.
In Geschäften für Elektronik Bastler sind Bausätze mit einfachen integrierten Schaltungen erhältlich. Mit Geduld lassen sich selbst aus solchen "primitiven" Schaltkreisen wie z.B. einem NOR Gatter mit 3 Eingängen einfache Computer zusammensetzen. Solche Aufgaben werden in der Tat häufig den Klassen für fortgeschrittenen Computerentwurf in einem College gestellt. Solche Schaltungen sind keine "Computer Chips" in dem Sinne, dass sie einen Computer in einem einzigen Schaltkreis enthalten, sondern vielmehr in dem Sinne, dass aus ihnen ein Computer aufgebaut werden kann.
Jack Kilby (Texas Instruments) genießt den Ruhm, dass er 1959 das Patent erhielt für die erste miniaturisierte Schaltung, die in einer einzigen Einheit vereinigt wurde (Abb. 2). Robert Noyce von Fairchild Camera and Instrument Corporation (später: Fairchild Semiconductor) wurde im selben Jahr ein Patent für eine integrierte Schaltung aus Silizium erteilt. Nach einigen juristischen Auseinandersetzungen entschieden die Unternehmen, sich gegenseitig Lizenzen für die Erfindungen zu erteilen.
|

Fairchild brachte 1961 einen kommerziell verfügbaren integrierten Schaltkreis auf den Markt, ein SR flip-flop. Der Rest der integrierten Schaltungen der RTL Produktlinie erschien ein Jahr später. Bis 1963 hatte das Unternehmen die Größe der Gatterstrukturen halbiert. Philco produzierte die ICs für Apollo in der gleichen Strukturgröße und verbesserte sie bis 1966. Beginnend in den frühen 60ern benutzten alle neuen Computerentwürfe diese integegrierten Schaltungen.[Hall96]
RCA führte 1965 den Spectrum 70 Computer ein, in dem integrierte Schaltungen von Fairchild benutzt wurden. IBM kam mit dem System/360 auf den Markt, das verkleinerte Dioden und Transistoren besaß, die auf mikroskopisch kleinen Leiterplatten montiert waren, eine hauseigene Version einer integrierten Schaltung (Abb. 3). Das System/360 (siehe unten) war über ein Jahrzehnt lang das Arbeitspferd für die Unternehmen, die kommerziell Computer einsetzten.
Computer in den 60er Jahren
waren riesige, schwere Maschinen, die ganze Räme in klimatisierten Gebäuden belegten.
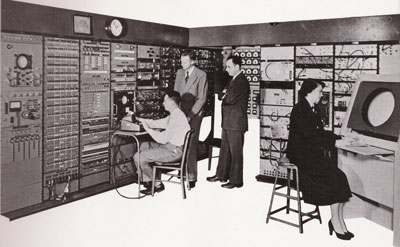
Einige waren es und andere waren es nicht. Die leistungsfähigsten Computer der damaligen Zeit waren riesig und nahmen ganze Räume ein (Abb. 4,5). Aber das trifft auch noch für die leistungsfähigsten Computer der heutigen Zeit zu (Abb. 6). Der Apollo Steuerungscomputer musste nicht besonders leistungsfähig sein, nur zuverlässig und seiner Aufgabe angemessen. In den 60er Jahren wurden verschiedene kleine Computer entwickelt (Abb. 7). Sie unterschieden sich, was Größe und Leistung angeht nicht sonderlich vom Apollo Steuerungscomputer.
|

|
|

Die Entwicklung des IBM System/360, des leistungsfähigen Mainframes der 60er Jahre, war das zweitteuerste Entwicklungsprojekt der Ingenieure dieses Jahrzehnts, das teuerste war das Apollo Projekt selber. Der Punkt ist, daß die leistungsfähigsten Computer der Welt immer eigene Computerräume benötigten und eine enorme Menge an elektrischer Energie brauchten. Die Existenz solcher Dinosaurier bedeutet nicht, daß kleinere Computer nicht möglich sind, weder im Jahre 2001 noch 1965.
|

Erinnern wir uns daran, daß der Apollo Steuerungscomputer keinesfalls ein Computer für allgemeine Anwendungen war. Auf ihm konnten keine Spiele oder Tabellenkalkulationen laufen, auch nicht Lohnlisten erstellt werden oder die Inventur eines Lagers mit Hilfe einer Datenbank. Er mußte lediglich für die Navigation der Raumkapsel zum Mond sorgen. Es wurden ebenfalls keinerlei Drucker, Diskettenlaufwerke, Bandlaufwerke, Kartenleser oder Lochkarteneinheiten benötigt. Und somit war er ein hübsch sclanker kleiner Computer.
Es wäre wohl ein wenig übertrieben, wenn das Apollo Steuerungssystem als Computer bezeichnet würde. Es ähnelt mehr dem, was wir heutzutage als Mikrocontroller oder vielleicht auch digitalen Autopiloten bezeichnen. Das meiste der Rechenarbeit wurde in der Mission Control auf mehreren Mainframes geleistet. Die Ergebnisse wurden in den Apollo Steuerungscomputer übertragen, der damit weiterarbeiten konnte. Der Computer an Bord von Apollo hatte nur für eine geringe Anzahl navigatorischer Probleme eine ausreichende Rechenleistung.
Es gibt einen großen Unterschied zwischen Computern, die für den allgemeinen Gebrauch oder für die digitale Steuerung, wie sie für die Raumfahrt gebaut werden, vorgesehen sind. Computer für allgemeine Anwendungen müssen einen vernünftigen Preis haben, damit genügend von ihnen verkauft werden und sich daraus ein profitables Produkt ergibt. Das bedeutet, dass sie größer sein und mehr Energie verbrauchen dürfen, wenn sie dadurch günstiger produziert werden können. Computer in der Raumfahrt müssen klein und leicht sein, selbst wenn dadurch ihre Herstellung enorm teuer wird.
Der Hersteller eines vielfältig benuztbaren Computers kann nicht wissen oder sich darum kümmern, wofür der Kunde diesen benutzen möchte. Das erfordert, dass ein Computer mit möglichst viel RAM Speicher ausgerüstet wird, der jedes Programm aufnehmen kann, das der Kunde laufen lassen möchte. Da viele Systeme, wie z.B. das IBM System/360, als time-sharing Systeme entwickelt wurden, war es notwendig, dass sie die Fähigkeiten besaßen, Programme schnell und einfach zu wechseln. Aber Steuerungssysteme brauchen nur ein einziges Programm laufen lassen. Somit ist es das Beste, es in einer Art von ROM zu speichern und nur soviel RAM zur Verfügung zu stellen, um temporäre Ergebnisse der Steuerungsberechnungen speichern.

